1. Estimate
drag and momentum
· In this
section, I drive the car with a constant PWM for a long enough time to find its
steady speed. As the lab7 instruction specified, I originally used active
breaking of the car to avoid crashing into the wall: I set the PWM to 150 in
the first part of car’s travel, and reuse the
functionality from lab 5 to let the car stop in front of the wall to prevent it
from breaking in the second part. I modified the code to achieve this
combination:
if (curtime < startT + constpwmduration)
{
u = 150;
}
else
{
u = (p + i + d);
// deadband
if (0 < u && u < deadband)
{
u = deadband;
}
else if (-deadband < u && u < 0)
{
u = -deadband;
}
else if (u > 255) // motor's range
{
u = 255;
}
else if (u < -255)
{
u = -255;
}
}
setVelocity(u, u);
appendLog(curtime - startT, -1, -1, curpos, -1, p, currealpos, d, dt, u);
where appendLog is function used to store the necessary values in
Artemis, its parameters are
appendLog(int timeval, float LPFrollval, float LPFpitchval, float tfsval, float tfs2val, float Pval, float compudistval, float Dval, float dtval, int uval)
-1 is used to
fill up the position of parameters that we don’t need in this lab.
· I put the
original u=p+i+d part into the else section in the if
condition, where the constpwmduration is the
duration of the constant PWM value in millisecond; when the condition is true,
motor’s PWM is constant 150, when the time pass the set value, the if condition
switch PWM to the stop in X meters from wall mode implemented
in lab5.
·
The way to set constpwmduration
is in the jupyter notebook: The command
ble.send_command(CMD.RUN_TO_WALL_STOP,"1500|5000|45|0.78|135|0|50") #constpwmduration|run
time|min nonzero speed|velocityfactor|kp|ki|kd
set the constpwmduration =1500 ms,
total running time=5000ms.
· However,
then I realized that the Time of Flight sensor’s short distance sensoring mode restricts the reliable readings to be with
1.8m, if I persist to include the stop in X meters from wall mode, I
wouldn’t have enough distance to confirm the steady speed, so I excluded it by
setting constpwmduration to 4000—this time is
long enough to ensured PWM is always in the constant value mode until it hit
the wall. A paper box is used instead to protect my car. Although, the code
above can be useful to achieve protection purposes if TOF sensor use long
distance mode.
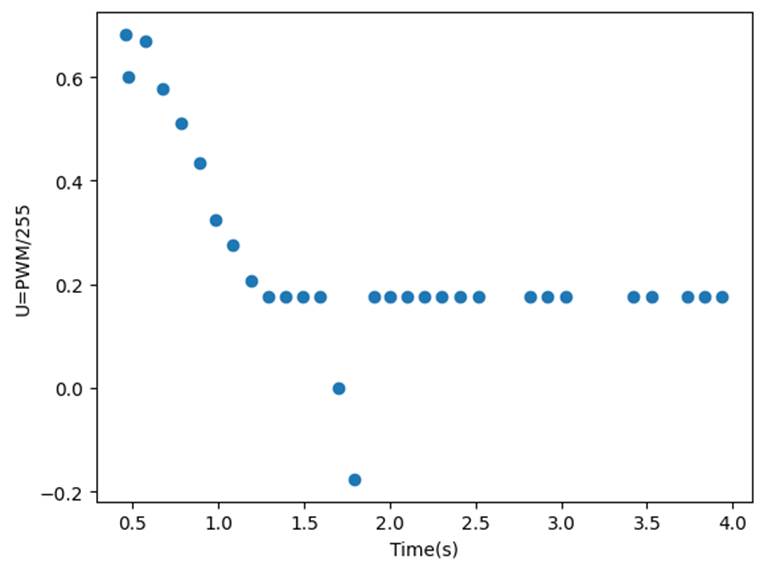
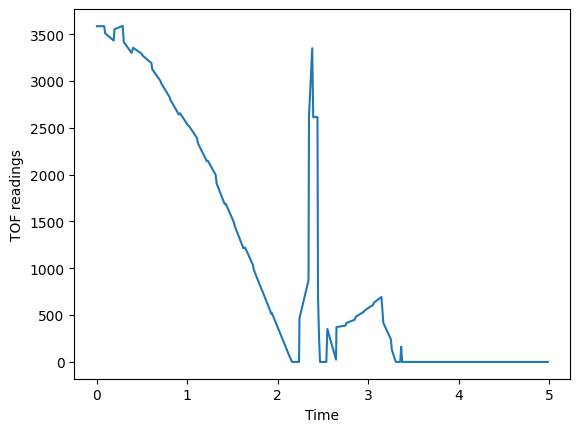
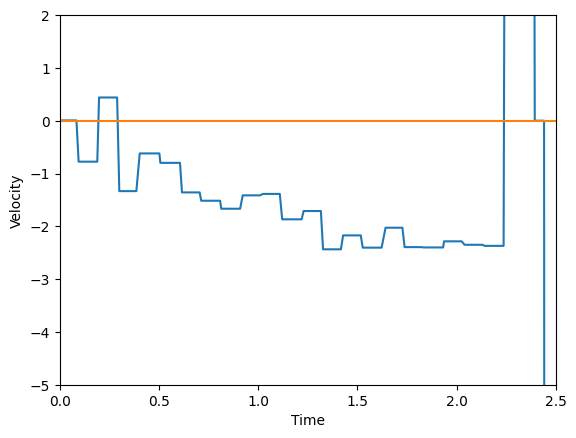
1. The Bluetooth
communication codes are the same as lab5. With a same procedure, I got the TOF
readings, PWM values, and velocity against the time after driving the car
toward the wall with PWM=150:
2. Video of
driving to wall:
qqq
3. Plots:

4.
I stored the data collected to Lab7_data.csv using Pandas:
import pandas as pd
df = pd.DataFrame({
'Time': timels,
'TOF': tfls,
'Motor inputs(PWM)': uls,
'Velocity': vells
})
# Save to CSV
df.to_csv('Lab7_data.csv', index=False)
5.
and extract them back when needed:
df = pd.read_csv('Lab7_data.csv')
timels = df['Time'].to_numpy()
tfls = df['TOF'].to_numpy()
uls = df['Motor inputs(PWM)'].to_numpy()
vells = df['Velocity'].to_numpy()
6.
According to the data, the car hits the
wall at t =2.165, so only the data before t=2.165 are meaningful for me.
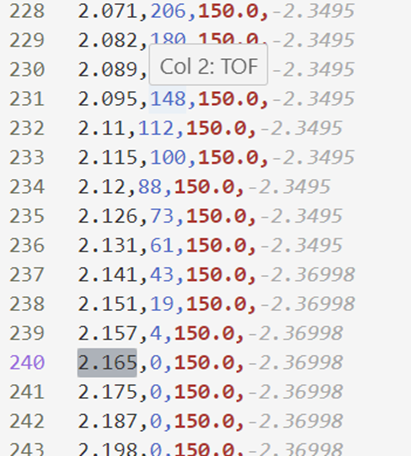
The csv data
shown above are Time, TOF, PWM, velocity respectively.
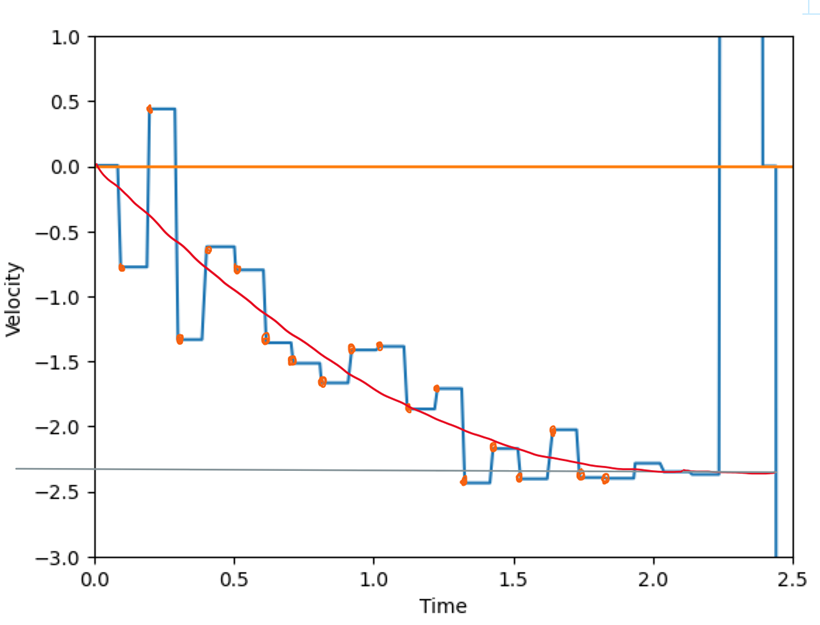
7. By looking
at the plots and averaging the last 3 unique meaning Velocity value in csv, I
found that the steady speed =(-2.2843-2.3495-2.36998)/3=-2.35632
m/s, Tsteady=2.04 s; Thus 90% rise time = 2.04*0.9=1.836
s, and the speed at 90% risetime = -2.40.
2. Initialize KF (Python)
8. Computing d
and m :
o
d=u/steady speed =1/ steady speed (since
we assume u=1) = 1/2356.32 mm/s
o
m=-d*t0.9/ln(1-0.9)=
-1/2356.32*1.836/ln(0.1)= 3.3839405 *10^4
9. Matrix A
and B:
o
Our state space equation is:
§ 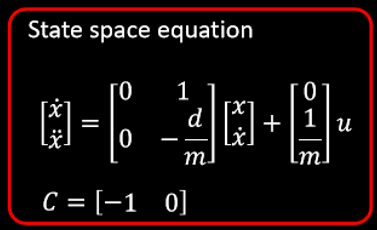
So A= [ [0,1],
[0,-d/m] ] = [ [0,1], [0,-d/m] ]= [[ 0, 1, ] [ 0, -1.25413131 ] ], B= [[0], [1/m]] =[ [0], [2955.1346]],
C=[-1,0]. They are all stored in array since NumPy provides lots of powerful
functions.
10. Process
noise and sensor noise
o
Determine the delta_t
between each TOF sensor readings
§ The car
sends back all TOF sensor readings (the ones without interpolation) to python
through Bluetooth, but that includes repetitive readings, so I implemented the
codes below to remove the repetitive parts and use the list of unique TOF readings
to construct an array of time stamps when these TOF readings are recorded; the
array of PWM and TOF readings are also constructed along with the time array as
they will also be used later; the array of u, tuz[1],
is divided by 255 to convert its range to [0,1]:
# realposar: real position array
realposar = np.array(realposls)
# tuzls = the list of time, u(=control=PWM
inputs), z(=observation=TOF readings) of each unique TOF sensor readings
# e.g. tuz[0] =
a list of time of each unique TOF sensor readings
tuzls = [[],
[], []]
prepos = 0
for i, pos in enumerate(realposar):
if prepos != pos:
tuzls[0].append(timels[i])
tuzls[1].append(uls[i])
tuzls[2].append(pos)
prepos = pos
tuz = np.array(tuzls)
tuz[1] /= 255
§ Then call diff() to convert
time array to delta_t array.
dtar_tof = np.diff(tuz[0])
o
Compute sigma_u
and sigma_z
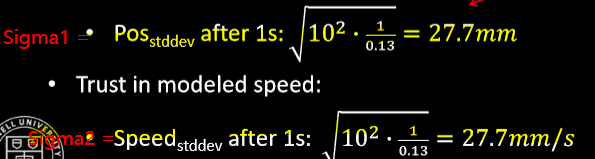
§ The average
of my dtar_tof, the array of the dt between each TOF
reading, was 0.11986 s; Substitute the average into the model below and got sigma_2=sigma_1=
28.884:
sigma_1=np.sqrt(10**2/np.average(dtar_tof))
sigma_2=sigma_1
sigma_3=20 # all length are in mm, but all time are in s
· The position
model used here is from lecture slides:
o
![]()
§ Plug sigma1,2,3
into the matrix:
sigma_u=np.array([[sigma_1**2,0],[0,sigma_2**2]])
sigma_z=np.array([[sigma_3**2]])
3. Implement
and test your Kalman Filter in Jupyter (Python)
a.
Implement the KF()
function
o
The function is defined below. it has two parts: prediction and updating. Since dt for each
step may be different, I updated it by including dt in the parameters. In
prediction part, I compute the Ad and Bd from A and B, then use Ad, Bd,
previous state (mu & sigma) along with motor inputs and its stddev to predict the prediction state (mu_p
& sigma_p); In updating stage, the prediction
states is updated with the observation from TOF sensor.
The kkf_gain shows how
much I trust TOF’s readings: the higher the kkf_gain
is, the more I trust TOF readings.
def kf(mu,sigma,u,z, dt):#mu and sigma are the prior state; u is control, z is
observation(sensor reading)
#prediction:
produce a prediction based on the prior state&control
Ad=np.eye(2) + dt*A
Bd=dt*B
mu_p = Ad.dot(mu) + Bd.dot(u)
sigma_p = Ad.dot(sigma.dot(Ad.transpose())) + sigma_u
#update: use obvservation
to update the prediction
sigma_m = C.dot(sigma_p.dot(C.transpose())) + sigma_z
kkf_gain = sigma_p.dot(C.transpose().dot(np.linalg.inv(sigma_m)))
mu = mu_p + kkf_gain.dot(z-C.dot(mu_p)) # a
formula that denoises mu
sigma=(np.eye(2)-kkf_gain.dot(C)).dot(sigma_p) # a formula that denoises sigma
return mu,sigma, mu_p
b. Choose the initial state of KF readings
o
The
Kalman Filter need previous state to work, so the initial state must be given
before kf()
is called, it is defined as follows, where mu_kf
starts with TOF’s 1st reading and the initial velocity, and var_kf
starts with empirical value ([[20, 20], [20, 20]]
# final len(kf) should==num+1
# kf=[mu list, sigma list]
mu_kf = [np.array([[tuz[2][0]],[vells[0]]]),]
var_kf = [np.array([[20, 20], [20, 20]]),]
c.
Loop through all steps and get KF result
o
Last, call KF after each step to
predict the next one:
_, num = np.shape(tuz)
#num-1
since dt is 1 less than length of time,u,z
mu_p_ls=[np.array([[tuz[2][0]],[vells[0]]]),]
for i in range(num-1):
mu, sigma,mu_p = kf(mu_kf[i], var_kf[i], tuz[1][i], -tuz[2][i],dtar_tof[i])
mu_kf.append(mu)
var_kf.append(sigma)
mu_p_ls.append(mu_p)
o
Plot the result:
§ 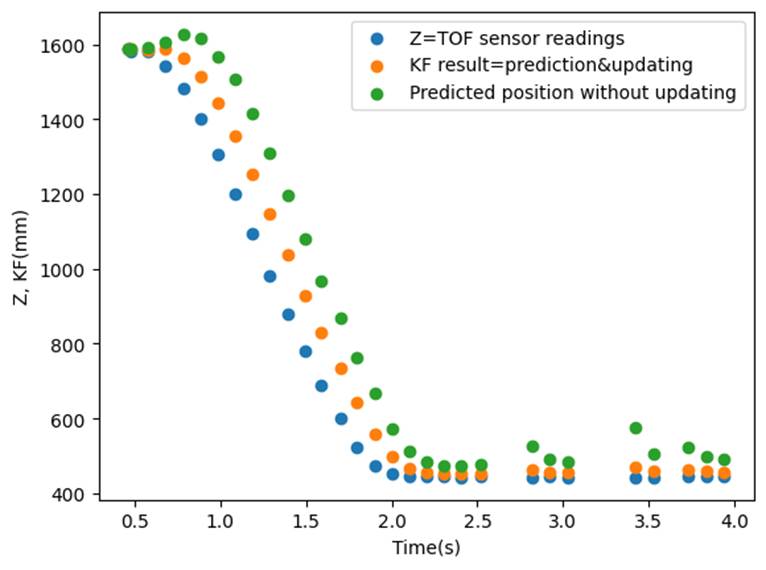
§ As the plot
show, the prediction is made and then updated successfully; the KF result is
very close to the TOF readings,
§ The U’s
plot is consistent with the curves above:
§